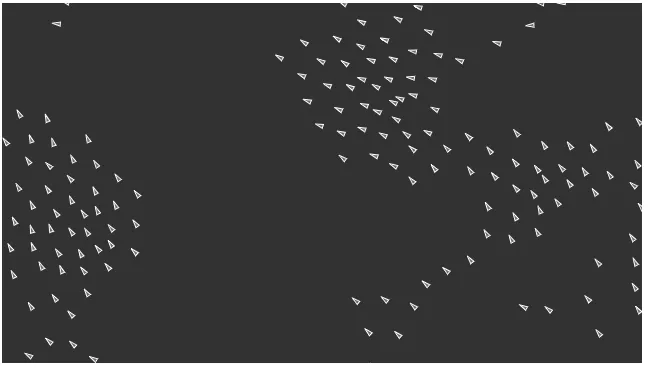
Refactoring Boids
Boids, by Daniel Shiffman is a Processing example of the flocking algorithm developed by Craig Reynolds using simple rules for individual "boids" to simulate the behaviour seen in flocks of real birds.
As a challenge from a colleague I wanted to see how I could refactor the code from a single file into smaller chunks so it's more readable and understandable.
Original
Here's the original code from the processing website:
Flock flock;
void setup() {
size(640, 360);
flock = new Flock();
// Add an initial set of boids into the system
for (int i = 0; i < 150; i++) {
flock.addBoid(new Boid(width/2,height/2));
}
}
void draw() {
background(50);
flock.run();
}
// Add a new boid into the System
void mousePressed() {
flock.addBoid(new Boid(mouseX,mouseY));
}
// The Flock (a list of Boid objects)
class Flock {
ArrayList<Boid> boids; // An ArrayList for all the boids
Flock() {
boids = new ArrayList<Boid>(); // Initialize the ArrayList
}
void run() {
for (Boid b : boids) {
b.run(boids); // Passing the entire list of boids to each boid individually
}
}
void addBoid(Boid b) {
boids.add(b);
}
}
// The Boid class
class Boid {
PVector position;
PVector velocity;
PVector acceleration;
float r;
float maxforce; // Maximum steering force
float maxspeed; // Maximum speed
Boid(float x, float y) {
acceleration = new PVector(0, 0);
// This is a new PVector method not yet implemented in JS
// velocity = PVector.random2D();
// Leaving the code temporarily this way so that this example runs in JS
float angle = random(TWO_PI);
velocity = new PVector(cos(angle), sin(angle));
position = new PVector(x, y);
r = 2.0;
maxspeed = 2;
maxforce = 0.03;
}
void run(ArrayList<Boid> boids) {
flock(boids);
update();
borders();
render();
}
void applyForce(PVector force) {
// We could add mass here if we want A = F / M
acceleration.add(force);
}
// We accumulate a new acceleration each time based on three rules
void flock(ArrayList<Boid> boids) {
PVector sep = separate(boids); // Separation
PVector ali = align(boids); // Alignment
PVector coh = cohesion(boids); // Cohesion
// Arbitrarily weight these forces
sep.mult(1.5);
ali.mult(1.0);
coh.mult(1.0);
// Add the force vectors to acceleration
applyForce(sep);
applyForce(ali);
applyForce(coh);
}
// Method to update position
void update() {
// Update velocity
velocity.add(acceleration);
// Limit speed
velocity.limit(maxspeed);
position.add(velocity);
// Reset accelertion to 0 each cycle
acceleration.mult(0);
}
// A method that calculates and applies a steering force towards a target
// STEER = DESIRED MINUS VELOCITY
PVector seek(PVector target) {
PVector desired = PVector.sub(target, position); // A vector pointing from the position to the target
// Scale to maximum speed
desired.normalize();
desired.mult(maxspeed);
// Above two lines of code below could be condensed with new PVector setMag() method
// Not using this method until Processing.js catches up
// desired.setMag(maxspeed);
// Steering = Desired minus Velocity
PVector steer = PVector.sub(desired, velocity);
steer.limit(maxforce); // Limit to maximum steering force
return steer;
}
void render() {
// Draw a triangle rotated in the direction of velocity
float theta = velocity.heading2D() + radians(90);
// heading2D() above is now heading() but leaving old syntax until Processing.js catches up
fill(200, 100);
stroke(255);
pushMatrix();
translate(position.x, position.y);
rotate(theta);
beginShape(TRIANGLES);
vertex(0, -r*2);
vertex(-r, r*2);
vertex(r, r*2);
endShape();
popMatrix();
}
// Wraparound
void borders() {
if (position.x < -r) position.x = width+r;
if (position.y < -r) position.y = height+r;
if (position.x > width+r) position.x = -r;
if (position.y > height+r) position.y = -r;
}
// Separation
// Method checks for nearby boids and steers away
PVector separate (ArrayList<Boid> boids) {
float desiredseparation = 25.0f;
PVector steer = new PVector(0, 0, 0);
int count = 0;
// For every boid in the system, check if it's too close
for (Boid other : boids) {
float d = PVector.dist(position, other.position);
// If the distance is greater than 0 and less than an arbitrary amount (0 when you are yourself)
if ((d > 0) && (d < desiredseparation)) {
// Calculate vector pointing away from neighbor
PVector diff = PVector.sub(position, other.position);
diff.normalize();
diff.div(d); // Weight by distance
steer.add(diff);
count++; // Keep track of how many
}
}
// Average -- divide by how many
if (count > 0) {
steer.div((float)count);
}
// As long as the vector is greater than 0
if (steer.mag() > 0) {
// First two lines of code below could be condensed with new PVector setMag() method
// Not using this method until Processing.js catches up
// steer.setMag(maxspeed);
// Implement Reynolds: Steering = Desired - Velocity
steer.normalize();
steer.mult(maxspeed);
steer.sub(velocity);
steer.limit(maxforce);
}
return steer;
}
// Alignment
// For every nearby boid in the system, calculate the average velocity
PVector align (ArrayList<Boid> boids) {
float neighbordist = 50;
PVector sum = new PVector(0, 0);
int count = 0;
for (Boid other : boids) {
float d = PVector.dist(position, other.position);
if ((d > 0) && (d < neighbordist)) {
sum.add(other.velocity);
count++;
}
}
if (count > 0) {
sum.div((float)count);
// First two lines of code below could be condensed with new PVector setMag() method
// Not using this method until Processing.js catches up
// sum.setMag(maxspeed);
// Implement Reynolds: Steering = Desired - Velocity
sum.normalize();
sum.mult(maxspeed);
PVector steer = PVector.sub(sum, velocity);
steer.limit(maxforce);
return steer;
}
else {
return new PVector(0, 0);
}
}
// Cohesion
// For the average position (i.e. center) of all nearby boids, calculate steering vector towards that position
PVector cohesion (ArrayList<Boid> boids) {
float neighbordist = 50;
PVector sum = new PVector(0, 0); // Start with empty vector to accumulate all positions
int count = 0;
for (Boid other : boids) {
float d = PVector.dist(position, other.position);
if ((d > 0) && (d < neighbordist)) {
sum.add(other.position); // Add position
count++;
}
}
if (count > 0) {
sum.div(count);
return seek(sum); // Steer towards the position
}
else {
return new PVector(0, 0);
}
}
}
Python
To make things more interesting, I thought I would refactor or rework in Python.
Split
First off, we have three distinct classes - the main game class, the flock (a container for the boids) and the boid class itself. In processing, we can add two extra tabs and reference those from the main file.
One important thing to note when dealing with multi-tab projects in Processing, pay special attention to which tabs are currently saved because they aren't by default and you can be editing one version of the code but running the last saved version which can be a bit confusing. The modified indicator in processing isn't very noticeable.
Game
In setup(), we set full screen, then create our initial flock (and we let the flock itself decide how big it's going to be).
from Boid import Boid
from Flock import *
def setup():
fullScreen()
global flock
flock = Flock()
def draw():
background(50)
global flock
flock.fly(width, height)
def mousePressed():
global flock
flock.add(Boid(mouseX, mouseY))
if (mouseButton == RIGHT):
saveFrame("flock-####.png")
In draw(), we have to let the flock move itself and I much prefer the function to be fly() rather than run(). Flying birds aren't usually that great at running :). When a mouse button is pressed, we add a new member to the flock at the current mouse position. That seems to work fine. Let's move onto the Flock itself.
Flock
As mentioned above, I have chosen to describe the flock in terms of it's members - adding, flying - rather than talking about running, drawing and addingBoid from the original version.
class Flock(object):
def __init__(self):
self.members = list()
def fly(self, width, height):
for member in self.members:
member.fly(self.members, width, height)
def add(self, newMember):
self.members.append(newMember)
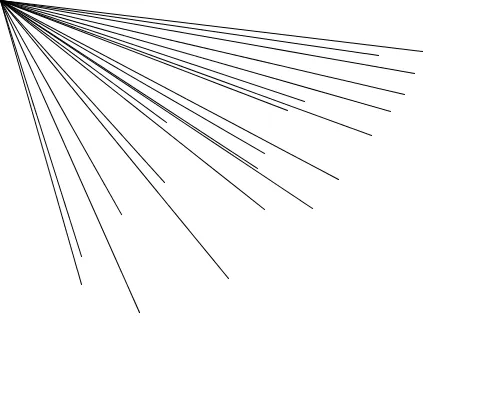
Boid
To get started, I have opted for a super simple version of the boid implementation. It records where it was created and never moves but just draws a black line from the original to its position to show itself.
class Boid(object):
def __init__(self, x, y):
self.x = x
self.y = y
def fly(self, members):
stroke(255)
point(self.x, self.y)
Debug
At this point, it's very useful to use the print() function to output what's happening to the console. Also for debugging purposes, I'm using the right mouse button to trigger a screenshot.
Boids
Now that we have something like a manageable split between the three concerns, game, flock and individual boid, it's time to look at the implementation of the boid itself and the rules it uses to interact with the flock-mates.
Here's a pretty straight rewrite of the original code from Java to Python and by far the biggest bit of the rewrite before the actual refactor:
class Boid(object):
def __init__(self, x, y):
self.acceleration = PVector(0, 0)
angle = random(TWO_PI)
self.velocity = PVector(cos(angle), sin(angle))
self.position = PVector(x, y)
# these may stand to be better described later.
self.r = 2.0
self.maxspeed = 2
self.maxforce = 0.03
def fly(self, members, width, height):
self.flock(members)
self.update()
self.borders(width, height)
self.render()
def applyForce(self, force):
# We could add mass here if we want A = F / M
self.acceleration.add(force)
def flock(self, members):
separationForce = self.separate(members) # Separation
alignmentForce = self.align(members) # Alignment
cohesiveForce = PVector(0,0) #self.cohesion(members) # Cohesion
# Arbitrarily weight these forces
separationForce.mult(1.5)
alignmentForce.mult(1.0)
cohesiveForce.mult(1.0)
# Add the force vectors to acceleration
self.applyForce(separationForce)
self.applyForce(alignmentForce)
self.applyForce(cohesiveForce)
def update(self):
# Update velocity
self.velocity.add(self.acceleration)
# Limit speed
self.velocity.limit(self.maxspeed)
self.position.add(self.velocity)
# Reset accelertion to 0 each cycle
self.acceleration.mult(0)
# Ensure boids wrap around the edges of the screen
def borders(self, width, height):
if self.position.x < -self.r: self.position.x = width + self.r
if self.position.y < -self.r: self.position.y = height + self.r
if self.position.x > width + self.r: self.position.x = -self.r
if self.position.y > height + self.r: self.position.y = -self.r
def render(self):
# Draw a triangle rotated in the direction of velocity
theta = self.velocity.heading2D() + radians(90)
# heading2D() above is now heading() but leaving old syntax until Processing.js catches up
fill(200, 100)
stroke(255)
pushMatrix()
translate(self.position.x, self.position.y)
rotate(theta)
beginShape(TRIANGLES)
vertex(0, -self.r*2)
vertex(-self.r, self.r*2)
vertex(self.r, self.r*2)
endShape()
popMatrix()
#
# Rules for boid movement
#
# A method that calculates and applies a steering force towards a target
# STEER = DESIRED MINUS VELOCITY
def seek(self, target):
desired = PVector.sub(target, self.position); # A vector pointing from the position to the target
# Scale to maximum speed
desired.normalize()
desired.mult(self.maxspeed)
# Above two lines of code below could be condensed with new PVector setMag() method
# Not using this method until Processing.js catches up
# desired.setMag(maxspeed);
# Steering = Desired minus Velocity
steer = PVector.sub(desired, self.velocity)
steer.limit(self.maxforce) # Limit to maximum steering force
return steer
# Separation
# Method checks for nearby boids and steers away
def separate(self, members):
desiredseparation = 25.0
steer = PVector(0, 0, 0)
count = 0
# For every boid in the system, check if it's too close
for other in members:
d = PVector.dist(self.position, other.position)
# If the distance is greater than 0 and less than an arbitrary amount (0 when you are yourself)
if d > 0 and d < desiredseparation:
# Calculate vector pointing away from neighbor
diff = PVector.sub(self.position, other.position)
diff.normalize()
diff.div(d) # Weight by distance
steer.add(diff)
count += 1 # Keep track of how many
# Average -- divide by how many
if count > 0:
steer.div(float(count))
# As long as the vector is greater than 0
if steer.mag() > 0:
# First two lines of code below could be condensed with new PVector setMag() method
# Not using this method until Processing.js catches up
# steer.setMag(maxspeed);
# Implement Reynolds: Steering = Desired - Velocity
steer.normalize()
steer.mult(self.maxspeed)
steer.sub(self.velocity)
steer.limit(self.maxforce)
return steer
# Alignment
# For every nearby boid in the system, calculate the average velocity
def align(self, members):
neighbordist = 50
sum = PVector(0, 0)
count = 0
for other in members:
d = PVector.dist(self.position, other.position)
if d > 0 and d < neighbordist:
sum.add(other.velocity)
count += 1
if count > 0:
sum.div(float(count))
# First two lines of code below could be condensed with new PVector setMag() method
# Not using this method until Processing.js catches up
# sum.setMag(maxspeed);
# Implement Reynolds: Steering = Desired - Velocity
sum.normalize()
sum.mult(self.maxspeed)
steer = PVector.sub(sum, self.velocity)
steer.limit(self.maxforce)
return steer
return PVector(0, 0)
# Cohesion
# For the average position (i.e. center) of all nearby boids, calculate steering vector towards that position
def cohesion(self, members):
neighbordist = 50
sum = PVector(0, 0) # Start with empty vector to accumulate all positions
count = 0
for other in members:
d = PVector.dist(self.position, other.position)
if d > 0 and d < neighbordist:
sum.add(other.position); # Add position
count += 1
if count > 0:
sum.div(count)
return self.seek(sum) # Steer towards the position
return PVector(0, 0)
One consequence of splitting the code up into separate modules is not having access to width and height properties inside the flock or the boid class. We need those values so we can implement the border behaviour where a boid flying off one side of the screen wraps around and flies in from the opposite side.
Refactor
So, what opportunities do we have to refactor (code and functionality)?
- Lots of maths which is a bit difficult to understand
- Hard coded creation policy
- No flexibility in drawing
- All boids behave in pretty much the same way.